Human brain theory
for the European Union’s Human Brain Project
ISBN 978-3-00-068559-0
3 The change in mapping topology and the transition from cylindrical to spherical body models
The neural tube with its central channel containing the ventricular fluid leads to a predominantly cylindrical shape of the neuronal body models.
The cortex cortex - if you imagine it unfolded - is arranged approximately hemispherically and therefore has a spherical shape.
Therefore, somewhere in the brain system, a transition from cylindrical to spherical shape must occur.
At the same time, the cortex cortex is a neuronal body model. It was noticed quite early on that there were actually many body models existing side by side. Thus, there are such body models in both the sensory and the motor cortex, which are called humunculi. It turns out that different modalities form independent body models in the cortex.
How does the transition from cylindrical to spherical body models take place in the brain?
First, at a first stage of the early cord ladder nervous system, the separation of modalities into modality ladders took place, from which the lobi of the brain emerged.
For this purpose, the upper conductor segments divided and formed independent partial conductors, which we also call loops here, because the excitation of the receptors rose in them, changed to the motor side as in a loop and descended again.
The temporal loop mainly received signals from the hair cell receptors. These served the vestibular system on the one hand and the lateral line sense of the trunk on the other. With the further development of the vestibular system, the sense of hearing developed, whose signals were also evaluated in the temporal loop.
Furthermore, the temporal loop received the olfactory signals directly - i.e. without diversions via the thalamic level - and later also included the forming limbic system.
The parietal loop received the signals of the muscle tension receptors of the trunk as well as those of the tendon organs and the signals of further receptors of the trunk analysing the joint positions. Later, the analogous signals of the developing fins or the extremities of the tetrapods were added.
The occipital loop received the output of the visual receptors.
The output of the cerebellum entered a new formation, the frontal loop.
The lobi of the brain emerged from these four modality loops.
But even within a brain lobe, further division of modalities occurred. This was because the neurons of the same modality had a tendency towards spatial concentration. Beginning at the top of the head segments, and later progressing to lower segments, the neurons and axons of the same modalities began to approach each other spatially and ultimately form independent neuron nuclei and axon bundles.
In the further development of simple vertebrates, it came about in the course of evolution that these originally cylindrically organised body models of the neural tube could develop further. On the one hand, this was due to the fact that the number of neurons in the head segments increased considerably. The cause was the formation of new types of receptors, but also the increase in body size and thus in the number of receptors. Much stronger was the space-occupying influence of the developing signal divergence. Here, input was divided among several, sometimes many neurons, which greatly improved the reliability of signal transmission. Another consequence of the strong signal divergence was the development of extreme value coding of signals. The resulting divergence modules allowed a much finer analysis of the receptor signals.
The uppermost head segments of the neural tube also divided into a left and a right part, from which the two cerebral hemispheres developed. Thus, the previously tubular central canal at the level of the head also divided into a left and a right section, each of which was assigned to one brain hemisphere; the original central canal ended at this bifurcation.
As a result, the remaining ventricular space at this level formed a kind of cavity that was closed off at the top and had two lateral branches. The sensory and motor nuclei, which originated from the early rope ladder system, now found their position at the upper boundary surface of this ventricular space. We can imagine this boundary surface simplified as the surface of a football. Only in the later course of evolution was this cavity also compressed and strongly deformed by the expanding brain. In humans it forms the third ventricle, the lateral ventricles are called the first and second ventricles. A fourth ventricle is located in the rhombencephalon (diamond-shaped brain), which houses the cerebellum, among other things.
These processes changed the neuronal body models in these upper segments. They were no longer cylindrical as in the neural tube, but took on a spherical shape. The cylinders became circular, but curved surfaces.
It is like the transition from cylindrical coordinates to spherical coordinates known from atlases and globes. On atlases, the Earth is usually depicted in cylindrical coordinates, which leads to distortions of the proportions in the polar regions, whereas on a globe, spherical coordinates form the basis and no distortions occur.
This change in imaging topology affected, among others, the torus semicircularis, the tectum opticum and the thalamic nuclei. These now formed approximately circular, somewhat curved surfaces with a distinct layered structure. The layered structure came about because the six classes of projection neurons were still preserved. Different submodalities also formed layered substructures. This layered structure is sufficiently known, for example, from the corpus geniculatum laterale.
Each sensory modality had its own layer of neurons. The segments were represented in the approximately circular surface by nested segmental rings, the innermost ring corresponding to the tail segment. And below these structures was now the originally sphere-like ventricular space of the third ventricle.
This arrangement in the surface enables many interactions with the long-distance senses that developed in the course of evolution, such as the visual sense, the olfactory sense, the electrosensory sense or the radar-like auditory sense of bats, but also with the vestibular sense. Because here, the associated receptors also formed areas, and the sensory projection neurons also transferred this area structure to the sensory input areas of these modalities.
Thus, in the course of evolution, multisensory modules such as the torus semicircularis or the tectum opticum emerged, which now allowed the advantage of interaction with the signals of the remote senses in the spherical imaging topology.
And because these modules projected via class 3 projection neurons into corresponding motor modules, multisensory influence on motor function was assured.
A particular advantage of these spherical sensorimotor body models was the possibility to generate targeted body movements via focal modules, which enabled the tracking of prey by evaluating olfactory, visual, acoustic or electrosensory signals caused by the prey. This will be described in more detail in the chapter on focal modules.
Likewise, the same principle could be used to avoid a predator.
Therefore, the focal modules developed into important motor control centres.
The focal modules, whose mode of action will be described later, necessarily required the transition from the cylindrical to the spherical body models, which we ultimately also find in the cortex. For the cortex, too, can - if one imagines it unfolded - certainly be understood as hemispherical and therefore also represents a spherical structure.
The development towards spherical body models began quite early in vertebrates and has already been demonstrated in fish.
The tectum opticum as the main target of the retinal projection has been extensively studied for different species. The topographical arrangement of this projection has been studied both anatomically (e.g. Attardi & Sperry, 1963; Meyer, 1980) and electrophysiologically (e.g. Jacobson & Gaze, 1963; Schwassmann & Kruger,
1965a).
Morna Gruber writes the following about this in her dissertation:
"Both Jacobson & Gaze (1964) and Schwassmann & Kruger (1965) were able to
through electrophysiological studies, a precise topographical projection of the
visual world on the tectum opticum, which is shown in Fig. 1.6.6."
The following image quotation from this dissertation shows the transfer of the topology of the retina into the sparsely formed layer of the tectum opticum:
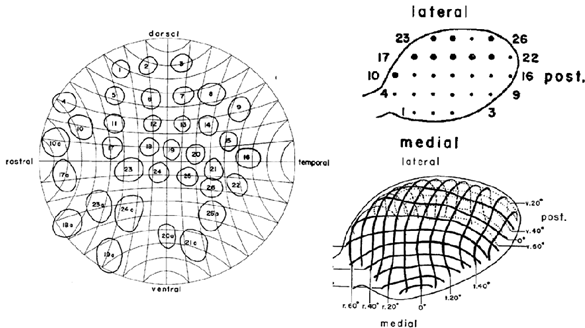
Figure from [123], Morna Gruber, dissertation
In this illustration, the retina is shown symbolically on the right and within it 26 different, but sorted and numbered receptive fields. The tectum opticum is shown on the right. The position of the corresponding receptive fields is shown at the top. Below, the spherical structure of the tectum is shown with a coordinate system that divides the retina into angles.
This shows that the tectum opticum consists of two symmetrical halves, which in their entirety represent the retina. The rounded overall structure makes it possible to use it as a focal module for the complete field of vision. The division into the left and right halves of the visual field can be completely omitted here.
But how can the neuronal input into the tectum opticum affect the motor system? How does the tectum control the eye movements, the rotation of the head towards the visual object targeted or the associated trunk movement? To do this, one must remember the topology within the modalities.
We can sort the different modalities according to their evolutionary age. The earliest modality was certainly olfaction, followed by the visual sense. They occupy the top two floors in the early rope ladder nervous system.
Since in our neural tube cylinder model of the modalities the older ones are always on the outside, the younger ones on the inside, the visual modalities, for example, must be on the inside, but the motor modalities of the trunk must be on the outside. With reference to the tectum opticum, we have to assume that in the inner surface of the spherical body model the receptor signals of the retina arrive. On the outside, distributed around this round surface, are the input neurons that receive the motor trunk signals from the muscle spindles, for example, as well as the input neurons that are triggered by the muscle spindles of the eye muscles.
When visual input arrives in the tectum opticum, the input neurons in the round area or layer are excited. This excitation spreads over the surface and leads to a maximum excitation through superposition. The reason for this is the strictly concave transfer function of each input neuron. It ensures that there is only one and exactly one excitation maximum. This is the location of the image of an important visual object.
Since the excitation also reaches the projection neurons located at the edge of the tectum to the motor neurons of the muscles of the eye or neck and trunk, the visual signals index a neuronal output in these motor control neurons. If the centre of excitation is in the middle of the tectum, the excitation at the edge of the tectum will be the same everywhere. Then the muscular tensions cancel out because each muscle receives the same excitation signal as its counterpart. If the visual object lies outside the centre, the excitation components at the edge of the tectum are no longer identical but different. This results in movements of the eyes, the neck muscles or the trunk muscles. Their projection neurons also form layers in the tectum, which are arranged according to the body model: the eye muscle neurons at the top, the neck muscle neurons below, and the trunk muscle neurons at the bottom. Therefore, the eye muscles are activated first, the others can follow with some delay. The focal modules are described in more detail in a separate chapter.
Monografie von Dr. rer. nat. Andreas Heinrich Malczan